
塑料模块带基本上像自行车链条一样驱动。嗯,它是由电动机驱动的,而不是由肌肉驱动的。但在大多数情况下,它只有一个或多个悬链线下垂后,驱动链轮每个包含一个0.8米和1米长度之间的无支撑带距离。这种皮带凹陷产生一个小的张力由其自身的重量返回到驱动链轮,这被称为背张力,这是一个重要的球员,以确保适当的皮带链轮啮合。
在我作为应用工程师的角色中,我经常看到链轮啮合不良的安装。在大多数情况下,这是由于缺乏背张力,使皮带很容易跳过链轮齿和失去其啮合。
 塑料模块皮带的最佳驱动配置
塑料模块皮带的最佳驱动配置

为了一个最优的驱动配置使用链轮大小来最小化thE多边形效应(看到前面的文章).中间有齿的中型链轮12和28颗牙齿通常是首选。不建议使用更大的链轮>36齿,因为积累的带距和链轮公差可能会导致啮合问题。
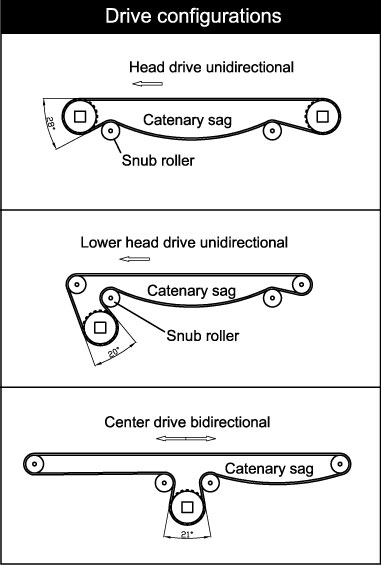
为了保持皮带正确啮合,皮带应绕着链轮以最小180°到大约200°的角度缠绕。通过增加缓冲辊或在链轮附近安装带背弯曲辊,可以很容易地达到增加的带缠绕。
特别是下头部和中心驱动配置之间的距离链轮和缓冲滚子(s)必须尽可能短。小心,不要把安全带夹在中间。最坏的配置是如果驱动链轮位置很低,而悬链线垂度很小。在这种特殊情况下,问题是,悬链线凹陷的重量低于链轮周围的皮带部分的重量。因此,悬链线垂度将建立在链轮周围,并引起脱离。
工程指导方针
你需要更多的信息吗?你可以下载HabasitLINK塑料模块化皮带工程指南或通过expert.blog@habasit.com联系我。水果机在线玩




 发送……
发送……
关于“塑料模块皮带的最佳驱动配置”的评论